Shihad 24.04.2011 07:23
Шаловливые ручки — Радиоуправляемый дирижабль своими руками.
Эй, моделисты, роботехи и сочувствующие! Хотите попробовать что-нибудь по-настоящему большое? Сегодня в домашних условиях из подручных материалов мы построим дирижабль!
Для постройки дирижабля Sverdlov Airship v 0.5 нам потребуется:
1.Ардуино-совместимый контроллер. Мы изготовили MRC28 по материалам сайта robozone.su.
2.Радиомодем с интерфейсом UART. Впрочем, можно летать на проводе RS-232 или USB. Мы купили Aurel-wiz-434. Две штуки - как приемник и передатчик.
3.Оболочка и гелий. В качестве оболочки возьмите радиозонды метеорологические. Поищите в своем городе - в Екб их продает ОАО "Метео" на Студенческой. Если нет - купите на Ебае. Нужны радиозондовые оболочки на 650 грамм - раздуются и поднимут больше. Гелий нужен марки "Б", у нас он продается на техгазе, баллон за 2000 + аренда\покупка баллона.
4.Винты, движки и драйверы к ним. От старых коллекторных помощнее - потянут в тихом помещении без сквозняков. До бесколлекторных, тянущих по 500 грамм.
В нашей альфа-версии стояли движки от советского магнитофона и драйвер к ним с того же робозона. В нынешней - бесколлекторные движки на 7А каждый и соответствующие драйверы к ним, купленные в магазине Пилотаж-RC. Как мы намаялись с подключением драйверов!
5.Сервомотор. Нужен для изменения вектора тяги. Наш выбор Hitec HS-49B, но можете взять любой подходящий.
6.Аккумулятор\батарея. Определитесь по движку. Можно использовать новый литий-полимерный аккум из магазина моделей, можно - 8-16 штук "Крон". Мы брали и то, и другое.
7.Рама. Алюминиевый уголок, полосу и трубу поищите в магазине стройматеиалов. Если кто умеет - может выклеить гондолу из углепластика.
8. Джойстик. Рулить будем именно им.
Изготовьте раму - нарежьте алюминиевый уголок ножовкой и склепайте каркас. Можете свинтить, но пользуйтесь гроверами - двигатели при нашей точности могут дать вибрацию, которая развинтит все крепления. Предусмотрите крепления для серводвигателя, место под вал, опору для электронных компонентов. Не забывайте, что драйверы двигателей нужно охлаждать. Разместите все на отведенных местах.
При достаточной аккуратности, в итоге получится нечто вроде этого:
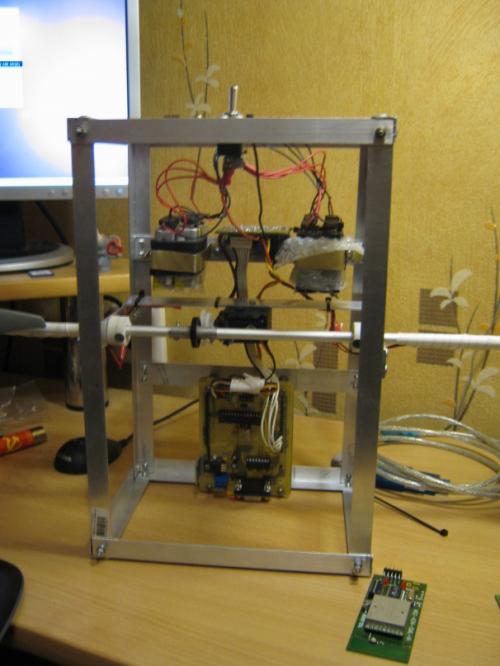
В верхней половине укреплены батареи и драйвер двигателей (прикручен к раме, как к радиатору). Усилие с сервопривода шестерни передают на вал с закрепленными двигателями. Снизу - контроллер и отдельно лежит радиомодем.
Драйверы двигателей, радиомодем и сервомашинку подключите в соответствующие выходы ардуино.
Залейте прошивку.
Подключите к компу джойстик и второй радиомодем. Запустите управляющую программу на питоне.
Наполните баллоны гелием - они надуваются в точности, как воздушные шарики в человеческий рост. Двух зондов хватит, чтоб поднять около одного килограмма.
Прикрепите зонды к раме. Ваша цель - добиться минимальной плавучести аппарата. Тогла его можно будет посадить на землю тягой двигателей.
Теперь выведите ваш дирижабль в открытое безветренное пространство - от школьного спортзала до тихого пустыря. А теперь - кораблю - взлет! От винта!

В чем отличия от предыдущей версии?
1.Поставлены бесколлекторные движки с тягой до 600 грамм и драйверы к ним. Теперь он летает быстро.
2.Установлен мощный аккумулятор. Теперь он летает долго.
3.Шары прикреплены к дирижаблю достаточно жестко - с помощью опорной рамы и тесьмы.
4.Управление выведено на джойстик.
5.Наконец, подключен радиомодем.
Над чем работать? Стабилизация движения, повороты, понизить чувствительность управления, научить избегать препятствия.
Опубликовано в журнале сообщества uralrobot.ru
 Похожие
Похожие Поделиться
Поделиться Shihad 24.04.2011 14:25 #
Shihad 24.04.2011 14:25 #
+ 0 -
http://www.youtube.com/user/EurasiaCB - видео
 digiwhite
digiwhite
Я б его лучше отдельными файлами приложил. Попробовал вложить код в спойлеры - не сохранился.
 kstep
kstep
Баг движка?
Ладно Си, его хотя бы скомпилить в таком виде можно, но вот питон уже в пролёте =(
Ладно Си, его хотя бы скомпилить в таком виде можно, но вот питон уже в пролёте =(
На видео оно только дрейфует в произвольном напрвлении и постоянно норовит грохнуться с шумом пикирующего бомбардировщика. Так и задумано?
Налет пилотов - десять минут. Стабилизатора нет. Управление сверхчувствительно. Инерция и сопротивление воздуха огромны. Неучтенные сквозняки по залу. И опять же, налет пилотов - десять минут.
При этом избирательная глухота, блин. Если прислушаться - я им ору, чтоб сначала попробовали пролететь весь зал по прямой. Нет, повороты отрабатывают.
При этом избирательная глухота, блин. Если прислушаться - я им ору, чтоб сначала попробовали пролететь весь зал по прямой. Нет, повороты отрабатывают.

